El proyecto Softmanbot tiene como objetivo la manipulación de objetos deformables que se fabrican en cuatro sectores manufactureros. Para ello se ha contado con la colaboración de empresas de estos sectores, como son:
- Neumáticos (MICHELIN)
- Suelas de zapato (PLASTINHER)
- Textil (DECATHLON)
- Muñecas (JUEMA)
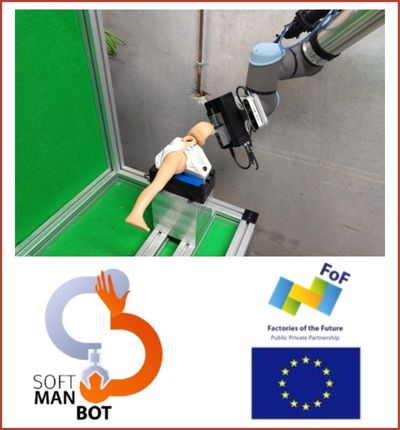
Actualmente AIJU está llevando a cabo las pruebas de ensamblaje y desmoldeo de muñecas con la célula robótica en las instalaciones de JUEMA.
Gracias al desarrollo que se ha llevado a cabo, a día de hoy, el robot es capaz de realizar el desmoldeo de cuatro tipos distintos de piezas de la muñeca, además de realizar la tarea de ensamblaje para formar, a partir de cada una de las piezas, la muñeca completa.
Asimismo, se ha elaborado material formativo para formar a los operarios de JUEMA en el manejo de los distintos dispositivos de la instalación, actuación en caso de emergencia, desarrollo de la tarea, etc. y se están realizando pruebas conjuntas entre técnicos de AIJU y personal de la empresa para que estos últimos adquieran el conocimiento y la destreza necesaria para ejecutar las tareas y usar correctamente el robot.
De forma complementaria, una empresa externa especializada en el sector, ha realizado el estudio y evaluación de riesgos con la finalidad de garantizar la seguridad en el manejo de la instalación.
Próximamente, se expondrán los resultados y conclusiones del proyecto, ya que éste se encuentra en su etapa final.
Más información:
Daniel Sánchez – danielsanchez@aiju.es