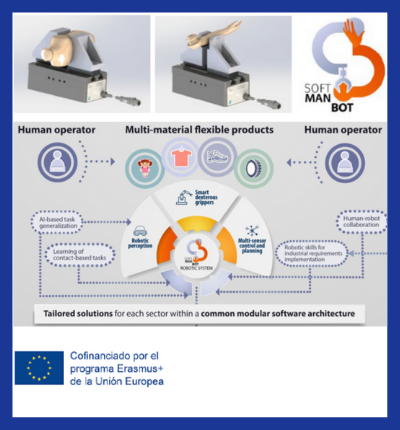
Dentro del proyecto SOFTMANBOT, tras el desarrollo de la célula robótica, se han desarrollado una serie de algoritmos para realizar la adquisición de las trayectorias de un operario a la hora de realizar el desmoldeo y ensamblaje de las piezas. Por otro lado, se han diseñado y fabricado mediante impresión 3D dedos para las pinzas del robot para las tareas de ensamblaje y desmoldeo.
Los avances del proyecto SOFTMANBOT se han centrado, en los últimos meses, en la adquisición de datos y en el diseño de dedos para el efector final del robot.
Respecto a la adquisición de trayectorias, mediante una cámara 3D y un IMU (sensor que proporciona datos sobre la orientación) es posible realizar el seguimiento de un operario cuando realiza la tarea de desmoldeo o ensamblaje. Por lo que se obtiene una trayectoria con la información de la orientación de la herramienta que se usa, en cada momento.
Por otro lado, se han diseñado una serie de dedos robóticos para las pinzas destinados a realizar la tarea de ensamblaje. Por un lado, están los dedos que irán a la pinza del robot, cuyo objetivo es agarrar firmemente las extremidades y evitar el deslizamiento de la pieza para ensamblarla al cuerpo. Por otro lado, están los dedos que sujetan el cuerpo, cuyo diseño se adapta al contorno de la pieza para asegurar un mejor agarre. Ambas han sido fabricadas por el departamento de materiales de AIJU mediante impresión 3D.
De esta manera, aunque se trate de trabajos diferentes, la adquisición de datos y el diseño de los dedos, permiten el avance en sus respectivas tareas (desmoldeo y ensamblaje) y del proyecto en general.
Más info:
Rubén Beneito