![]()
Desarrollo de aplicaciones de robótica móvil y visión 3D para BinPicking y procesos de acabado superficial de piezas plásticas – MOVIBOT2
El proyecto MOVIBOT2 consiste en el desarrollo de sistemas de seguridad adaptados a la robótica móvil, que permitan la realización de operaciones de mecanizado sin necesidad de instalar vallados de seguridad.
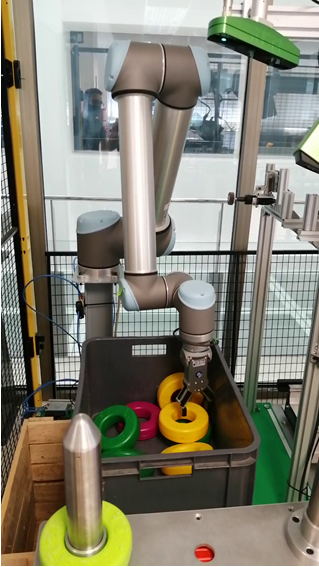
El sistema de seguridad consistirá en el desarrollo de una herramienta de corte dotada de sistemas mecánicos para la ocultación rápida de las partes peligrosas de la herramienta y un sistema de seguridad basado en visión 3D. Además, se realizarán aplicaciones de BinPicking de piezas almacenadas de forma caótica en contenedores.
Resultados esperados:
Entre los resultados esperados, se encuentran, la implementación de un sistema de visión 3D para la realización de tareas de BinPicking por parte de un sistema robótico móvil. Mediante el procesamiento de la información visual obtenida, el sistema realizará el reconocimiento de los objetos y el cálculo de la posición y la orientación que poseen las piezas a manipular. El desarrollo de un sistema de seguridad basado en la utilización de varias cámaras 3D de bajo coste sincronizadas y capaces de trabajar en tiempo real de forma simultánea y de una herramienta de corte inteligente con sistema mecánico de corte retráctil. Además, se desarrollará un demostrador en el que se simulen procesos productivos industriales que permitan mostrar a las empresas interesadas las nuevas tecnologías en materia de seguridad, visión y herramientas de corte seguras adaptadas para su implementación sobre sistemas robóticos móviles.
Referencia: IMDEEA/2020/38
Programa de Ayuda: Proyectos de I+D en cooperación con empresas.
- Fecha de Inicio: 01/07/2020
- Duración: 18 meses
- Estado: Finalizado
CONTACTO COORDINADOR:
- Nombre: Joaquín Juan
- Teléfono: +34 96 555 44 75
- e-mail: joaquinjuan@aiju.es
NºExpediente:IMDEEA/2020/38
Subvención: 103.526,54 €
Financiado por:
![]()
